입력 : 2025.03.26 10:36
㈜로보티즈가 AW2025 전시회에서 피지컬 인공지능(Physical AI) 기술이 적용된 차세대 로봇 기술을 선보였다고 26일 밝혔다. 특히 부스에서 진행된 'AI 매니퓰레이터' 데모는 행사에서 가장 주목을 받았다.
지난해 스탠퍼드 대학의 'Mobile ALOHA'가 큰 반향을 일으킨 이후, 시각·언어·행동(Vision-Language-Action, 이하 VLA) 모델 기반의 모방 학습(Imitation Learning, 이하 IL)이 로봇 산업의 주요 트렌드로 부상했다. 이러한 흐름 속에서 로보티즈는 오는 6월, 맞춤형 협동로봇(OpenMANIPULATOR-Y, 이하 OM-Y)을 출시할 예정이다. OM-Y는 오픈소스 기반의 로봇 매니퓰레이터로, 사용자가 필요에 따라 관절과 링크를 자유롭게 조정할 수 있는 높은 모듈화를 제공한다.
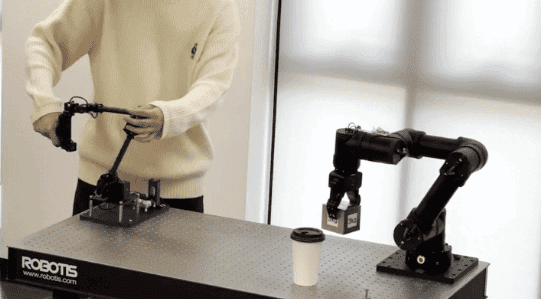
OM-Y 출시와 함께 공개될 'AI 매니퓰레이터'는 IL 구현에 필수적인 주요 구성 요소인 리더(Leader), 팔로워(Follower), 카메라를 포함하며, 모두 오픈소스로 제공된다. 또한, 해당 제품은 다이나믹셀과 완벽하게 호환돼 다양한 산업 분야의 폭넓은 활용이 가능하다.
특히 리더는 중력 보상, 마찰 보상, 그리퍼 기반 햅틱 피드백 기능을 탑재해 VLA 모델을 위한 효율적인 데이터 수집이 가능하도록 최적화됐다. 이를 통해 연구자 및 개발자들은 보다 정밀한 IL 모델을 구축할 수 있을 것으로 기대된다.
로보티즈는 사용자의 편의성을 극대화하기 위해 ROS2(Open Robotics) 지원을 강화하고 있으며, 현재 허깅페이스의 LeRobot 플랫폼과의 호환성 확보를 위한 작업을 진행 중이다. 이와 함께 엔비디아의 Isaac Sim, 구글딥마인드의 MuJoCo, 오픈로보틱스의 Gazebo Sim과 같은 시뮬레이터 환경에서 강화 학습(Reinforcement Learning) 플랫폼에 대한 지원도 확대될 예정이다.
로보티즈 김병수 대표는 "지속적인 혁신을 통해 뛰어난 성능과 경쟁력 있는 가격을 갖춘 로봇 솔루션을 제공할 계획"이라며, "이러한 원천 기술들을 바탕으로 양팔 형태의 인간형 작업 로봇도 곧 선보일 예정"이라고 말했다.